Measurement system of the Mobile Robotics System for coastal zone monitoring
The measuring equipment of the system consists of a radar station for remote sensing of the water surface, a meteorological station for collecting weather information, navigation equipment for obtaining the coordinates of the measuring point, laser obstacle detection equipment (LIDAR) and the on-board computer for data collection.
The software of the MRS measurement system is a distributed application that includes the server and client parts, Figure 1.
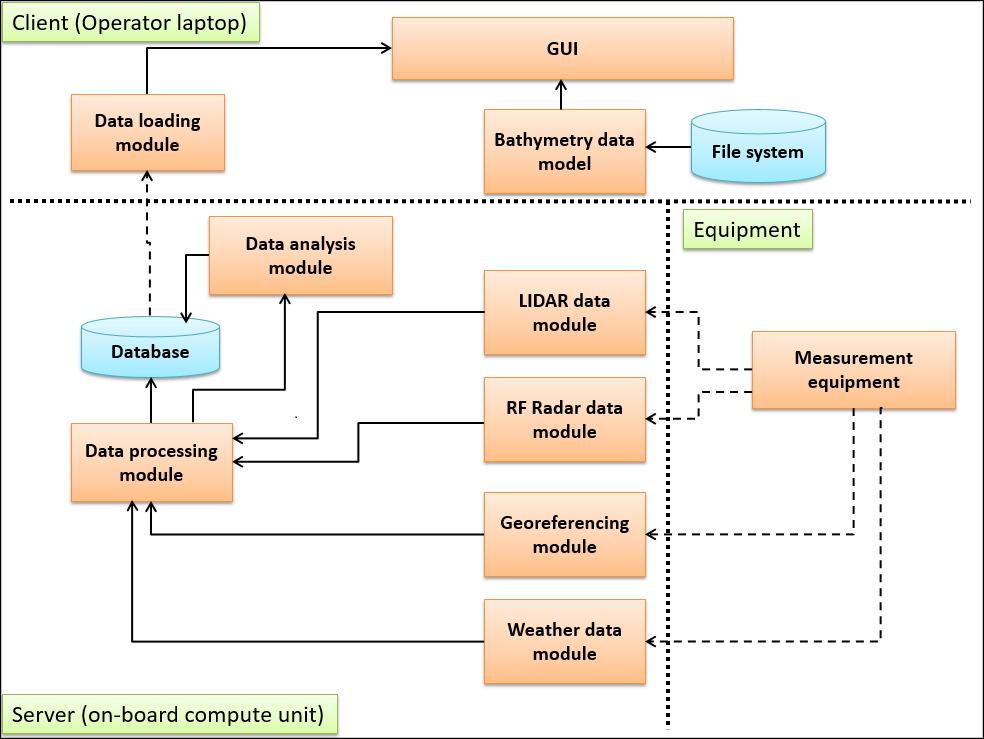
Fig. 1. The software architecture
The server part contains a set of modules for communicating with the measuring equipment, obtaining data and writing to the database. The client program is launched on the operator's laptop and connected to the database via a radio channel. The client application provides an ability to view the current state of the measuring equipment, manage its settings and display the results of measurements. The user interface of the client is presented in Figures 2-8.
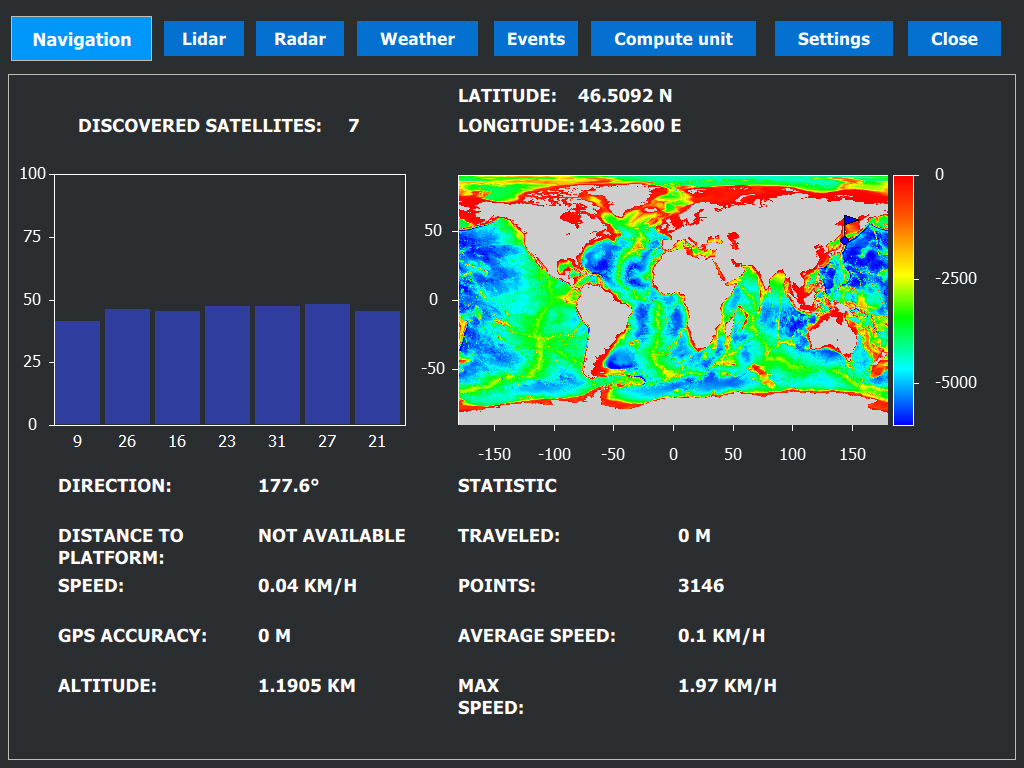
Fig. 2 Interface page for navigation data visualisation
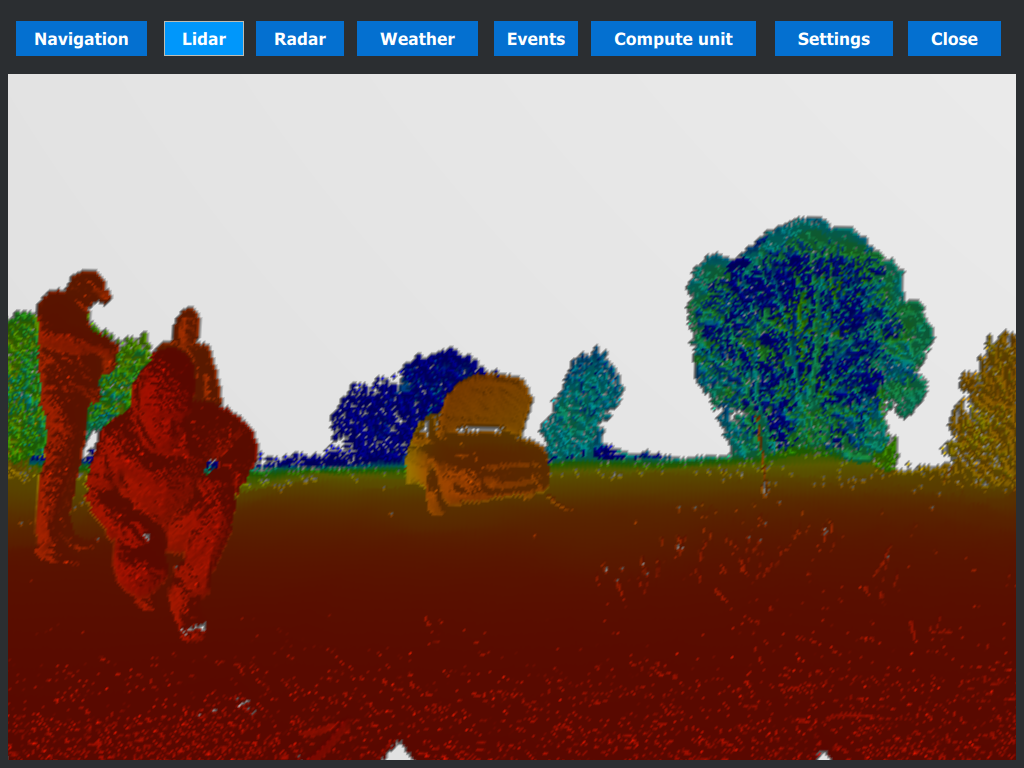
Fig. 3 Interface page for 3D scanning system visualisation
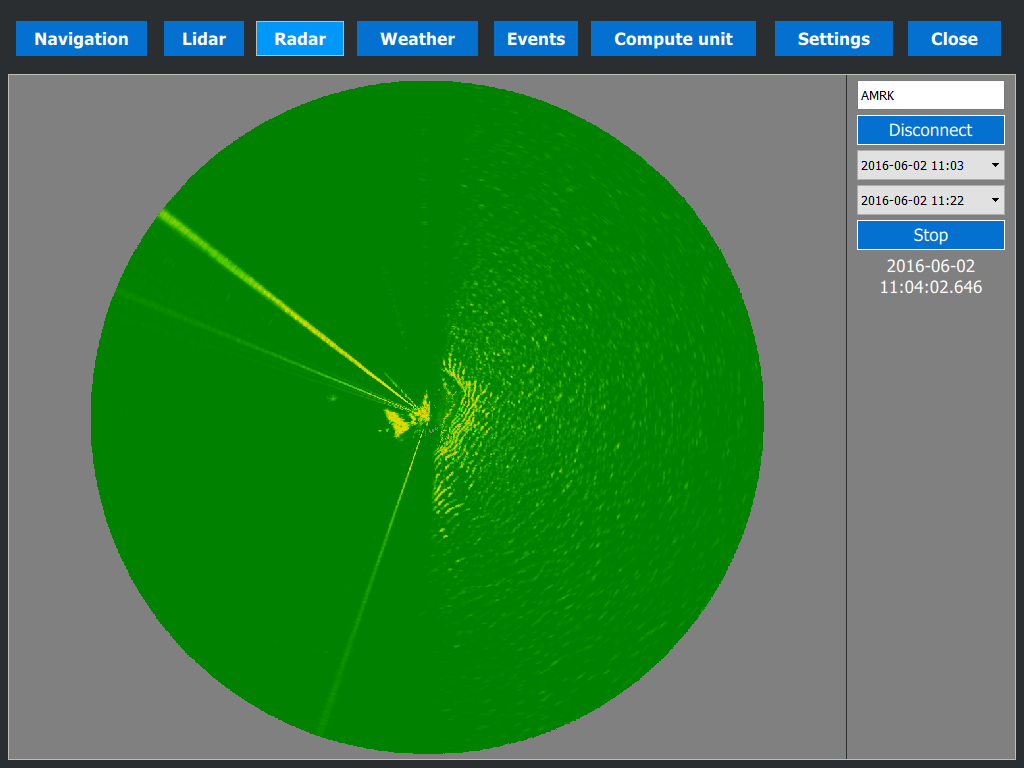
Fig. 4 Interface page for radar data visualisation
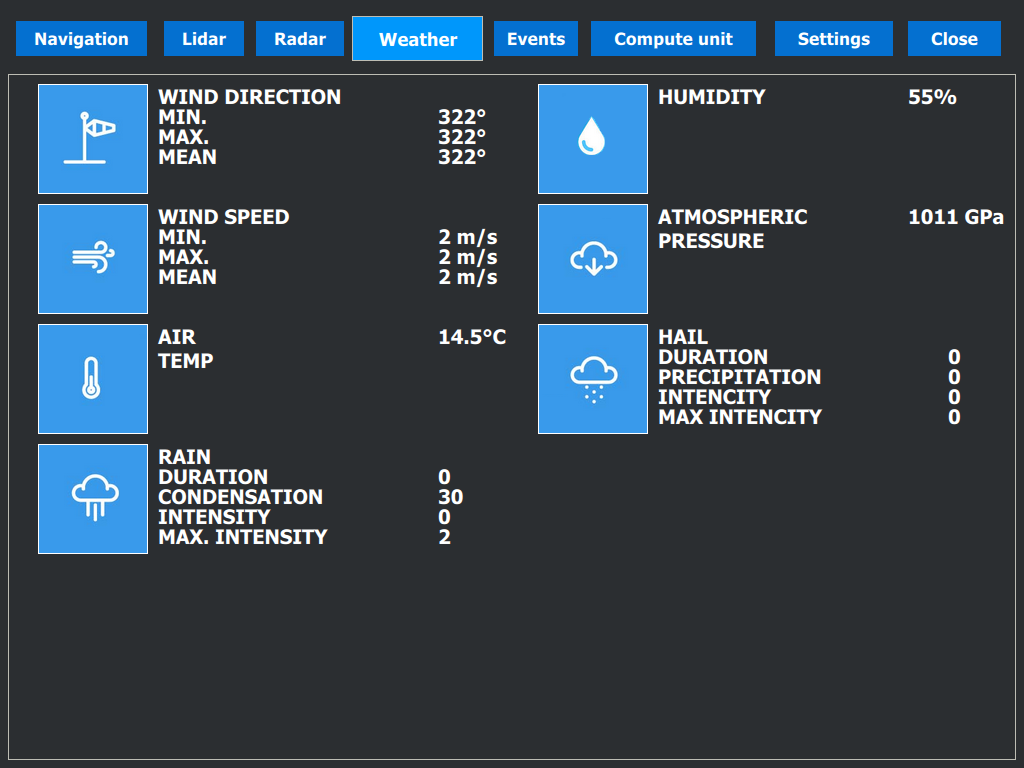
Fig. 5 Interface page for meteo data visualisation
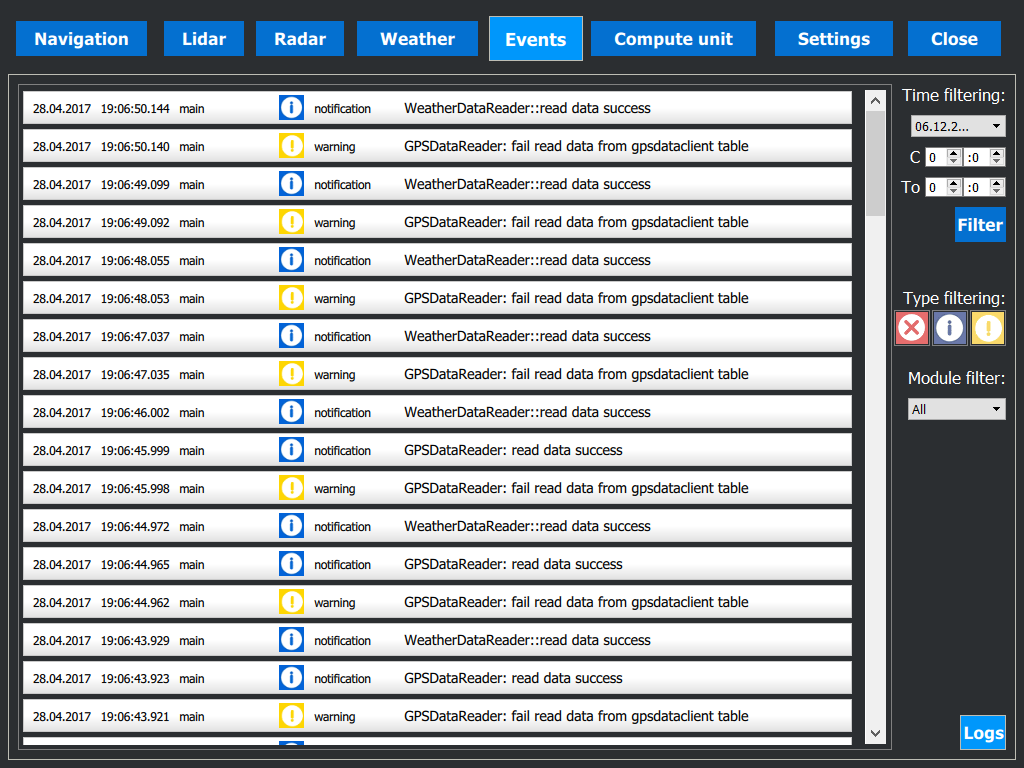
Fig. 6 Interface page for on-board events
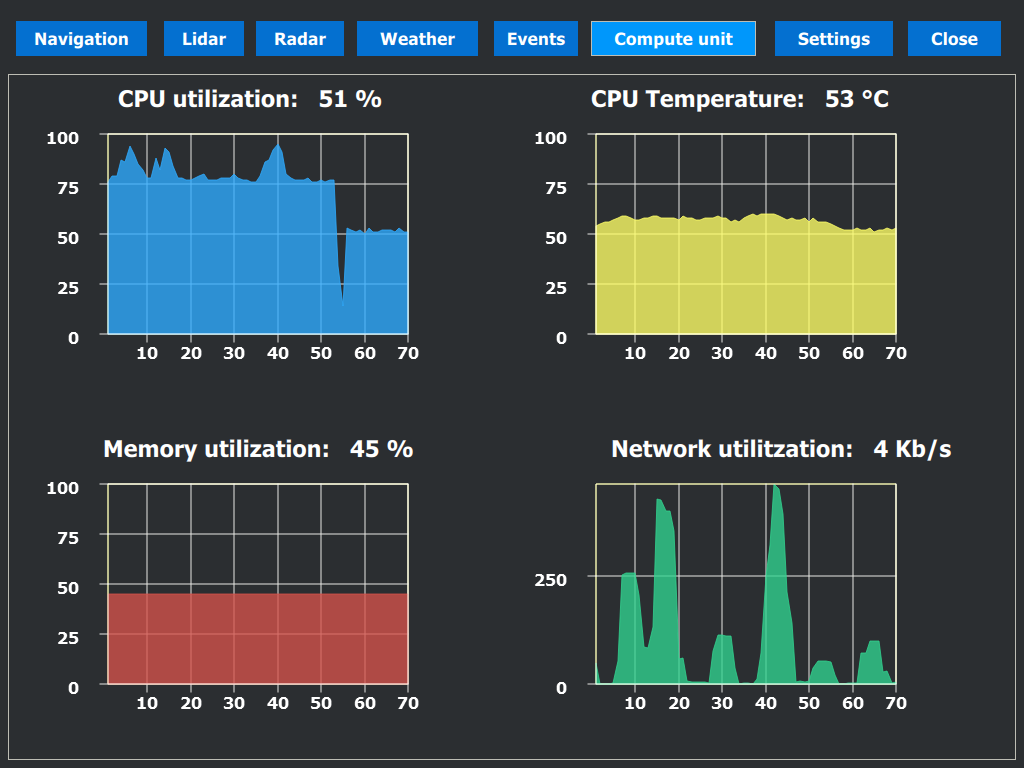
Fig. 7 Interface page for resource monitor of the on-board compute unit
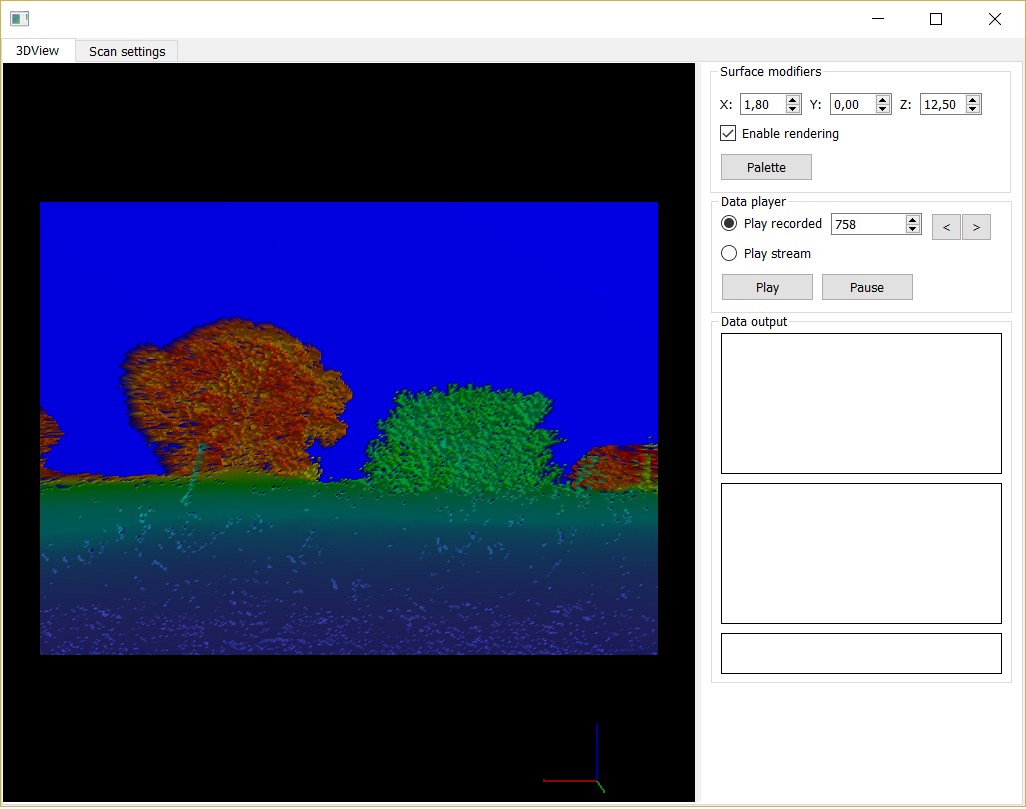
Fig. 8 Software for collecting, processing and visualisation of 3D point cloud. Also provides ability to control hardware of 3D scanning system. Has record and playback functions of 3D point cloud.